


Anycubic Kossel Linear plus
Nachdem ich an Weihnachten einen Anycubic bekommen habe, blieb der von Umbau und diversen Verbesserungen natürlich nicht verschont.
Aber vorab erst mal die Geschichte und meine Erfahrungen.
Nachdem ich im Netz so manche negative Aussagen fand, war ich doch positiv überrascht.
Erster Eindruck war eine sehr gute Verpackung mit vielen Teilen die zum Teil bereits vormontiert waren.
Dabei waren u.a. eine gedruckte Anleitung (49 Seiten) mit vielen Bildern in englisch.
Also los geht es mit zusammen bauen.
Imbusschlüssel waren 3 verschiedene Größen dabei außer für M4, aber sowas hat man ja in der Werkstatt.
Desweiteren ein Seitenschneider, eine Pinzette, eine Spachtel ca 60 breit, ein Stahlmasslineal 20cm ,von allen Schraubteilen war immer eins mehr drin.
UND 1 Kg PLA 
Problematisch könnten die mit Lot versehenen Powerzuleitungskabel werden, Adernendhülsen wären sicher besser gewesen.
Um die Powerkabel aber in die Schraubklemmen zu schrauben musste ich das Mainboard ausbauen, weil man an die erste Klemmschraube nicht dran kommt. Die ist vom Rahmen verdeckt.
Nachdem alles zusammengebaut war schaut der ganze Aufbau sehr aufgeräumt aus . AUSSER !!! Die Zuleitungen für den Druckkopf, Die sind zwar alle in einem Spiralschlauch, aber der hängt halt irgendwo in der Luft.
Irgendwie habe ich das Gefühl, dass da dem Entwickler die Ideen ausgegangen sind.
Naja vieleicht fällt mir ja noch was ein
So
Nachdem alles zusammengeschraubt war: Der erste Test
Autoleveling funktionierte nicht so ganz, ich musste ein Z Offset von ca 0,55 mm einstellen bis die erste Druckschicht sauber aussah.
Ein Testzylinder 40mm Durchmesser 50 Hoch mit 1,2 mm Wandstärke war der erste Druckversuch.
100mm Druckgeschwindigkeit in slic3r eingestell und dann während dem Druck mit den Prozenten hoch auf fast 300, hier wurde er dann unruhig und kam beim 2ten Versuch auch mal aus der Spur.
Aber die 100mm/s macht er sehr suverän.
Die Spachtel braucht es um die gedruckten Teile wieder von der Druckplatte zu bekommen. Diese haften auf der neuen Unterlage sehr gut, fast sogar zu gut.
Die Elektronik scheint für einen Delta Drucker doch etwas schwach ausgelegt zu sein.
Es werkelt hier ein Atmega2560 ... mit 1/16 Mikroschritten pro Stepp
So die Schrittmotorentreiber flogen als erstes raus und wurden durch 1/32 Mikroschritten pro Stepp mit 4 x DRV 8825 Treiber ersetzt
Als zweites flog die mitgelieferte Beschichtungsfolie des Druckbettes wieder raus, weil sie bereits nach einigen Drucken erste Macken hatte.
Anstatt wurde die spezalbeschichtete Glasplatte Ultrabase D240 von Anycubic eingebaut.
Nötig waren hierfür spezielle Befestigungen welche ich dann mit ABS gedruckt habe.

Dann bekam der Rahmen mit 6 Weiteren Boschprofilen etwas Stabilität
Als nächstes Problem entpuppte sich das Hotend weil das bis zur Düse gehende 4mm Ad Teflonrohr nach der ersten Demontage sich nicht mehr ganz bündig bis zur Düse schieben ließ.
wurde ersetzt durch dieses
Long Distance J-head V5 Hot End 0.4 mm / 1.75 mm 3D Drucker Extruder RepRap

Aber auch dieses wurde von mir mit einem Kupferkern modifiziert. So dass die Wärme zu Kälte Zone auf ca 2mm schrumpfte.
Desweiteren Probleme durch Schrittverluste
am Filamentvorschub
wurde mit einem Nema23 behoben und funktioniert
Schrittverluste sobald mal eine kleine Unebenheit der Düse den Weg versperrt.
Wurde dann mit 3 x NEMA23 anstatt der billigNema17er verbessert .
Soweit alles kein Thema,
230mm Durchmesser soll er drucken können, deshalb hatte ich mir den gekauft,
DIE Wahrheit sind gerade mal 170mm auf einem 240ger Druckbett ?????
ab diesem Durchmesser druckt der Anykubik Dallen nach unten,
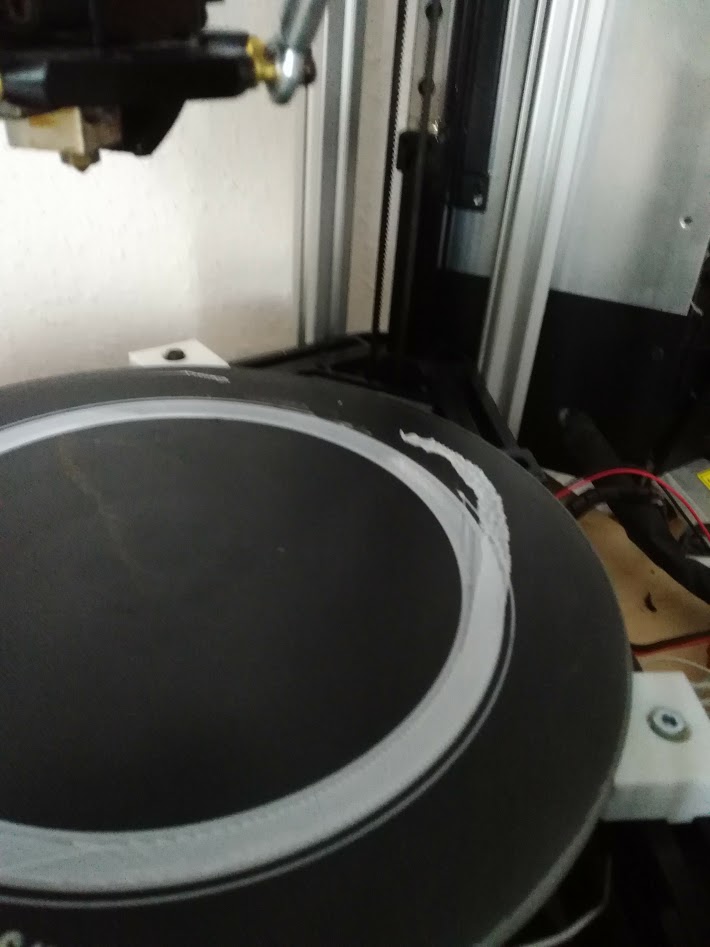
Also das hat u.a. ein Aufsetzen der Düse auf dem Druckbett mit anschließenden Luftschlangen zur Folge.
Nach vielem Suchen lag hier tatsächlich ein Softwareproblem vor!!!
UND ZWAR ist auf dem Linear PLUS die Firmware vom kleinen Bruder drauf gewesen 
Nachdem ich einfach auf Verdacht mir die neueste Firmware draufgeladen hatte stellte ich fest, dass das Problem nicht mehr besteht.
NEUESTE FIRMWARE ist also ein MUSS gemacht werden.
Weiter geht es mit den im Anycubic verbauten NEMA17 (38 mm lang) mit ca 20-24 Ncm. Die sind für sowas doch echt zu schwach ausgelegt.
Schaut man bei Nanotec findet man NEMA17 auch bis 80 Ncm allerdings für 40€ das Stück
So die von mir verwendeten kurzen NEMA23 mit 90Ncm lagen hier noch von einem anderen Projekt rum.
Also Adapterplatten gebohrt und NEMA23 mit 0.9°Grad Schrittwinkel eingebaut.
Problem ist nun der 8Bit Mikrocontroller Atmega 2560. Der schafft keine 320 Schritte pro mm ohne dass man die Maschine extreme langsam stellt. So wie mein Druckbild ausgeschaut hat kann er nicht mal die 160 mit den 1/32 Mikroschrittetreibern.
Gut hierfür gibt es nur eine Lösung
Ein 32 Bit Smoothieboard - bestellt und eingebaut.
Nun geht es weiter mit dem Anycubic
So langsam ist nur noch der Rahmen orginal
Nachdem ich nun das Smothieboard eingebaut hatte, ist mir erst mal einer der DRV8825 Treiber abgeraucht.
Klar einen Nema23 mit den Treibern zu fahren ist auch schon ein bisschen gewagt. Naja den Treiber habe ich erst mal ausgelötet und durch einen neuen ersetzt. Hierfür gibt es für das Smoothieboard erst mal Punkteabzug. Bei dem Atmega2560 Board hatte man einfach einen neuen eingesteckt.
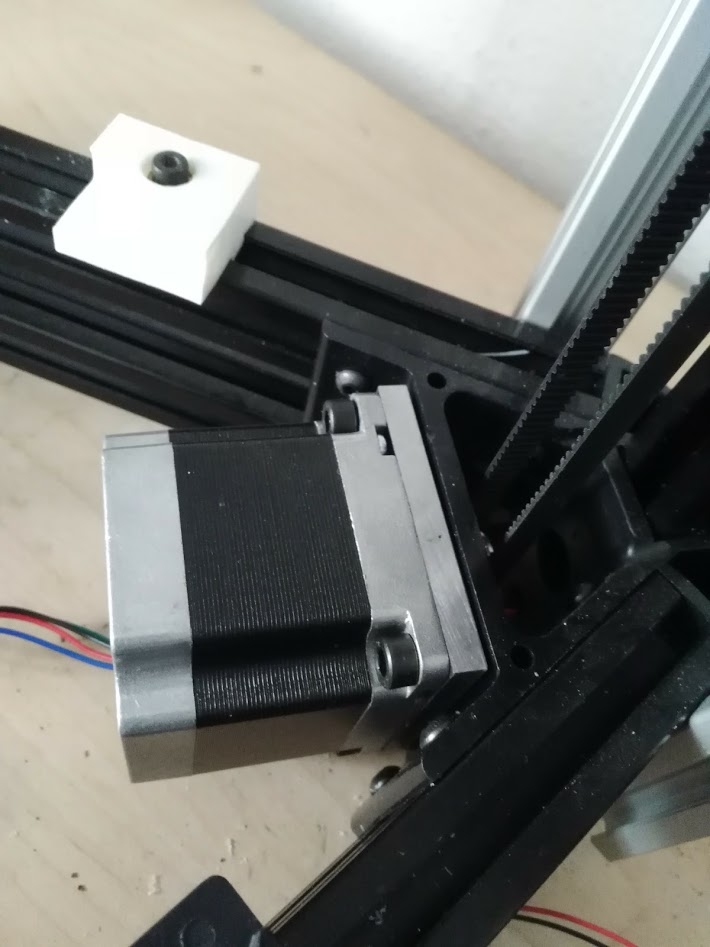
So nun hab ich mich mal etwas mit Schrittmotorentreibern beschäftigt und habe mich für den DRV8711 mit entsprechender MOSFET Endstufe entschieden. Schaltplan gibt's demnächst auf meinem Account zu sehen. Vorab jedoch ein paar Bilder.
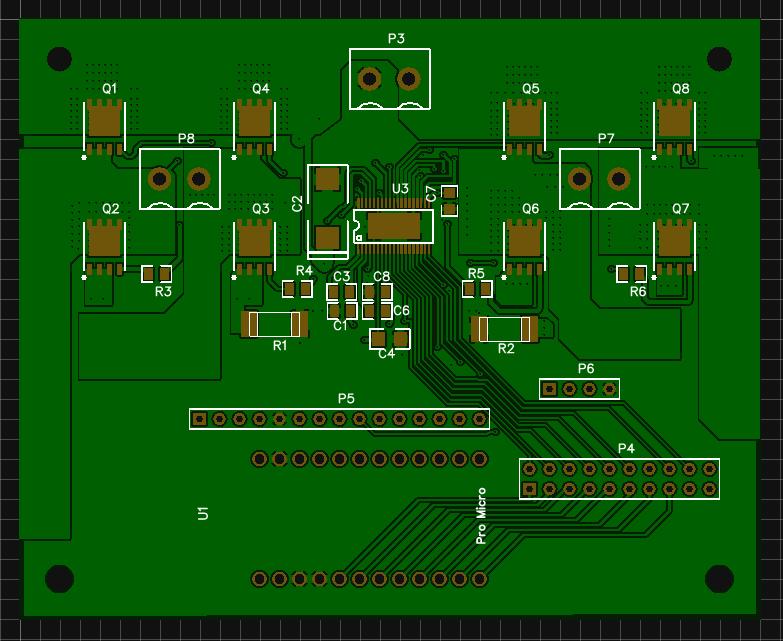
Also die Eigenschaften des Steppertreibers sind schon mal nicht schlecht. 1/256 Microsteps , Stalldetection ... eine ganze Latte an Features bietet dieser DRV8711. Konfigurieren läßt sich der DRV8711 über SPI. Hierfür hatte ich zunächst einen Atmega32u4 Micro Pro vorgesehen. Aber der dürfte nach ersten Tests zu langsam sein. Über Jumper läßt sich hier auch eine Dasychain mit mehreren Kanälen aufbauen, so dass nur ein Treiberboard mit dem Micro Pro bestückt werden muss. Allerdings kann das Board auch als Standallone (also eine Achse) für einen Schrittmotor hergenommen werden.
Hier habe ich nun ein STM32F411 Nucleo als Testboard für die Software vorgesehen. STM deshalb weil ich da Encodereingänge habe, welche mir dann die Absolutposition ermitteln. Dann kann man per Software ein Closed Loop aufbauen. Dies ist jedoch noch in Entwicklung.
Specification of the MOSFET
| Category | Transistors|MOSFET | |
| Package | PQFN | |
| Manufacturer | Infineon Technologies | |
| Drain to Source Voltage (Vdss) | 30V | |
| Power Dissipation (Max) | 3.6W | |
| Rds On (Max) @ Id, Vgs | 3.1mΩ@20A,10V | |
| Current - Continuous Drain (Id) @ 25°C | 27A | |
| FET Type | N-Channel | |
| Vgs(th) (Max) @ Id |
2.35V@50uA |
Ich denke damit dürfte genug Reserve für stärkere Nema23 usw vorhanden sein.
Ob und inweit manche der Funktionen später z.B. im SmothieBoard verwendbar sind wird sich zeigen. Die Funktion Stalldetection wäre natürlich schon eine feine Sache.
Insbesondere wenn man sie mit sowas wie Pause, G28 (Home all Axis) und dann Resume kombinieren könnte.
- Anmelden, um Kommentare verfassen zu können